About me
I am a Robotics Researcher. I am currently working as a Senior Researcher at the Secure Systems Research Center in Technology Innovation Institute, Abu Dhabi, UAE. I obtained my Ph.D. from the University of Michigan, Ann Arbor, MI, USA with specialization in Aerospace Engineering. My research interests are in Robotics and Artificial Intelligence with a focus on developing intelligent multi-robot systems that coordinate together, collaborate with and assist humans to accomplish wide range of complex tasks autonomously, safely, securely and resiliently.
Feel free to navigate through this webpage to know more!
Research Interests
-
Multi-Agent Systems: Coordination, Collaboration, Planning, Control and Resiliency
-
Human-Robot Collaboration and Interaction
-
Aritifical Intelligence for Robotics
Recent News
-
Attended Abu Dhabi AI-Robotics Conference (AIRoC) 2025 in Abu Dhabi, UAE.
-
Our paper got accepted in ICRA 2025, Atlanta, USA.
-
Attended and presented our research at GenZero Workshop 2024 in Abu Dhabi, UAE.
-
Presented our research at IROS 2024 in Abu Dhabi, UAE.
-
Attended International Conference on Automation Science and Engineering (CASE) 2024 in Bari, Italy.
-
Our paper got accepted in IROS 2024, Abu Dhabi, UAE.
-
Our paper got accepted in ICRA 2024, Yokohama, Japan.
-
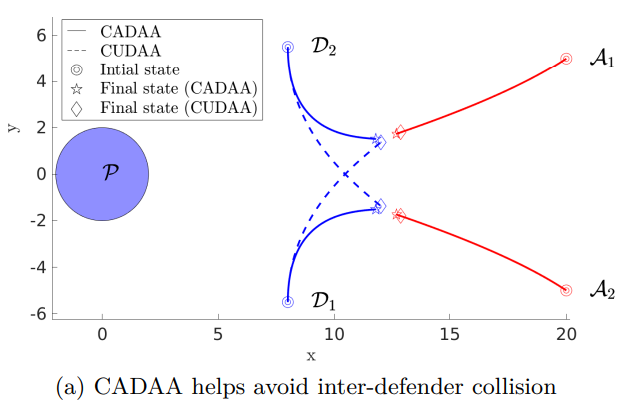
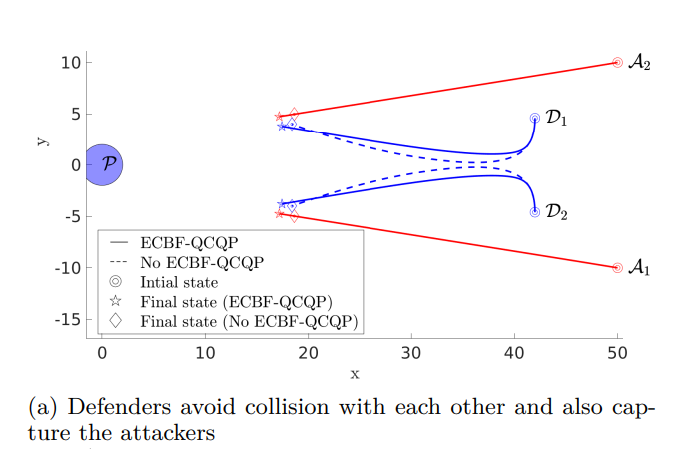
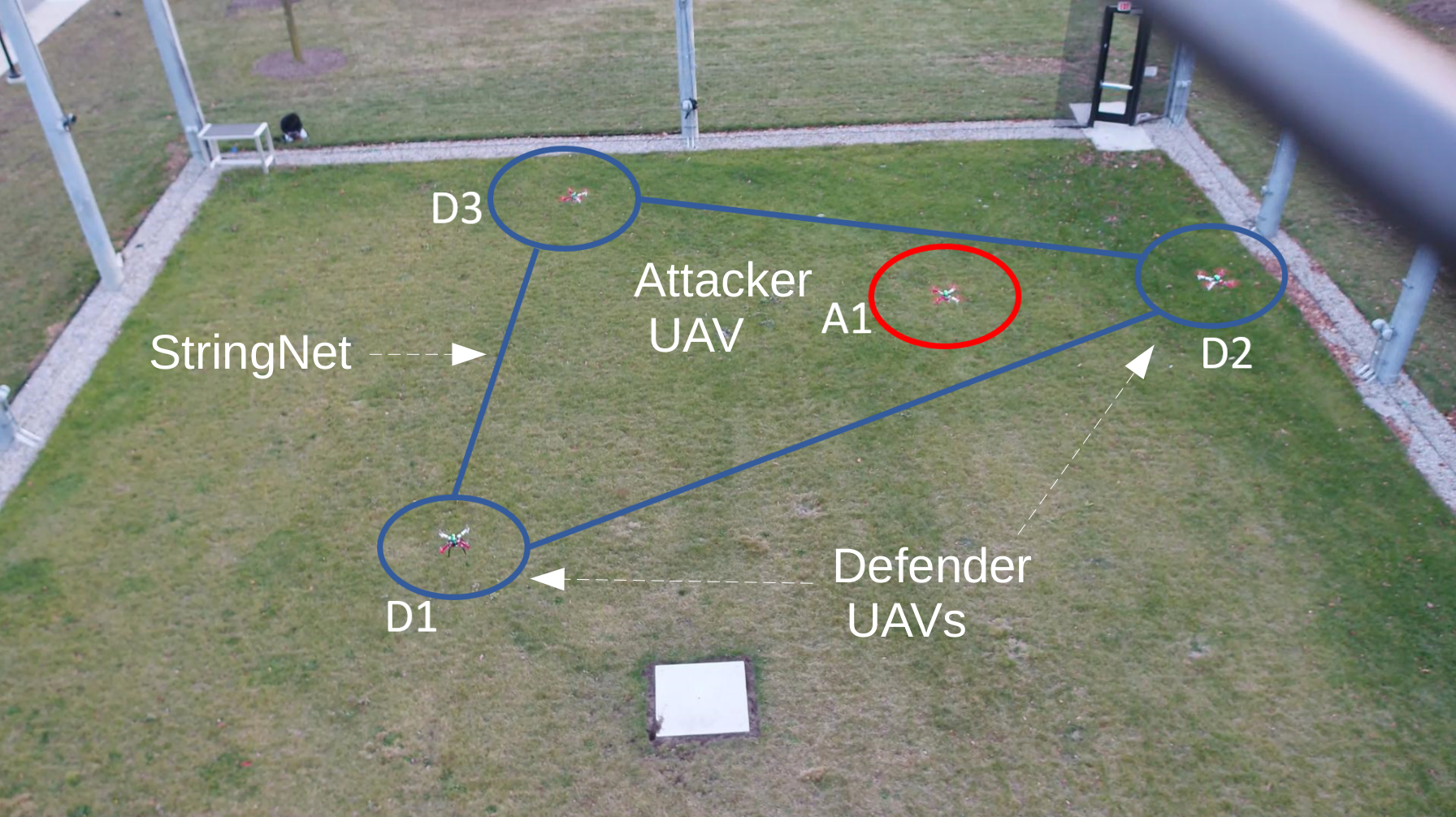
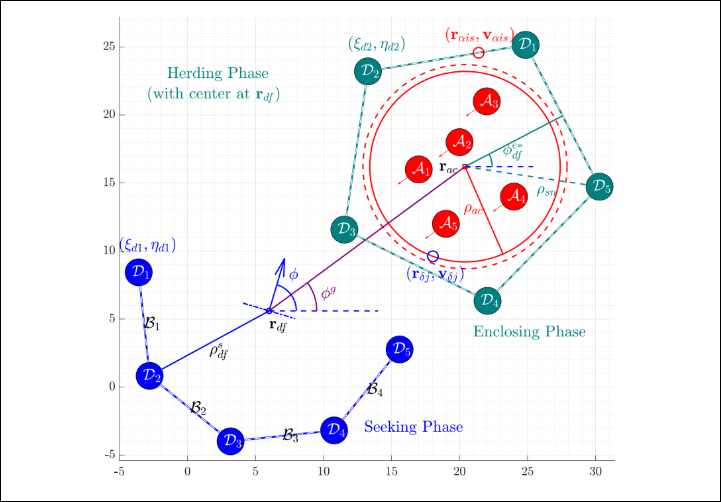
Our research paper "Aerial Swarm Defense using Interception and Herding Strategies" got accepted in TRO
-
Presented our research on human-robot interaction in CCTA2023, Bridgetown, Barbados.
-
Our research paper got accepted in CCTA2023, Bridgetown, Barbados.
-
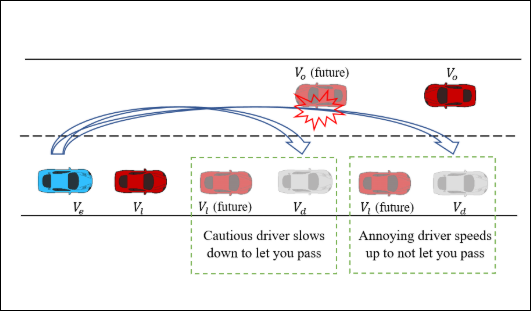
Our research paper "Robust Leader-Follower Formation Control for Human-Robot Scenarios" got accepted in ACC 2022.
-
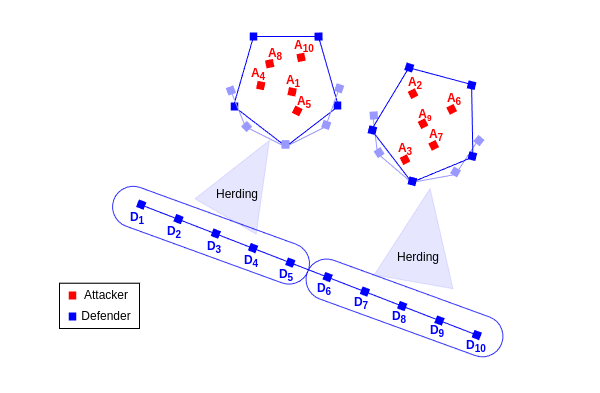
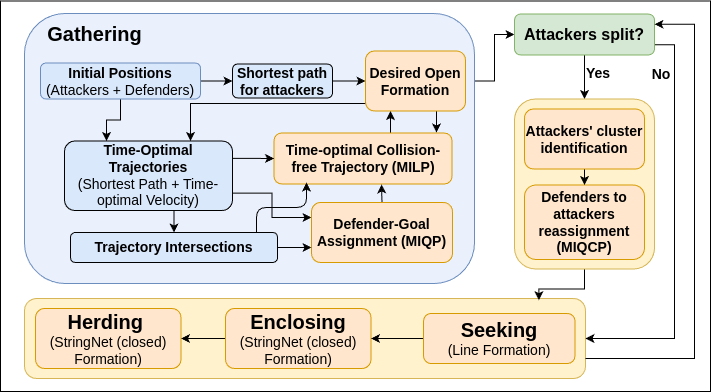
Our research paper "Aerial Swarm Defense by StringNet Herding: Theory and Experiments" got accepted in Frontiers in Robotics and AI.
-
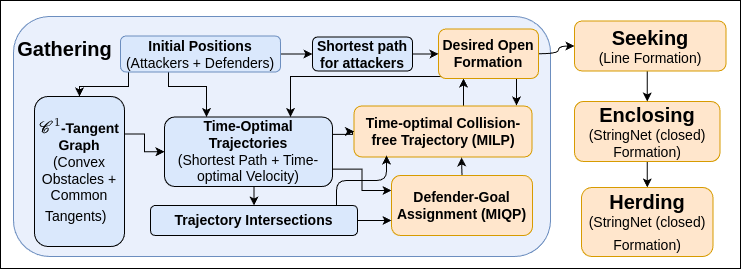
Our Research paper "Multi-Agent Planning and Control for Swarm Herding in 2D Obstacle Environments under Bounded Inputs" got accepted in TRO.